Adaptive Curriculum Generation from Demonstrations for Sim-To-Real Visuomotor Control
Abstract
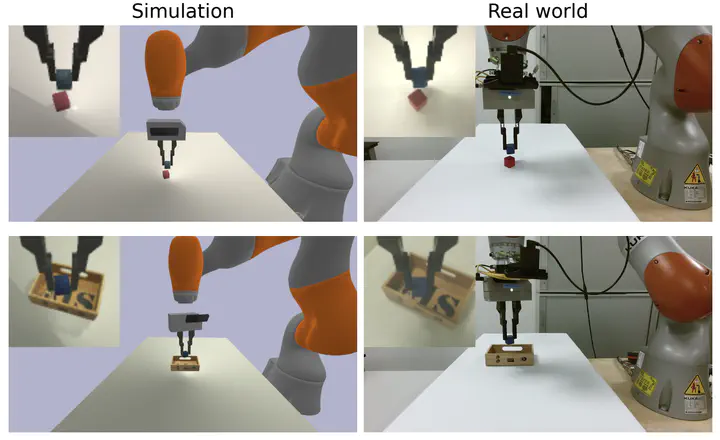
We propose Adaptive Curriculum Generation from Demonstrations (ACGD) for reinforcement learning in the presence of sparse rewards. Rather than designing shaped reward functions, ACGD adaptively sets the appropriate task difficulty for the learner by controlling where to sample from the demonstration trajectories and which set of simulation parameters to use. We show that training vision-based control policies in simulation while gradually increasing the difficulty of the task via ACGD improves the policy transfer to the real world. The degree of domain randomization is also gradually increased through the task difficulty. We demonstrate zeroshot transfer for two real-world manipulation tasks, pick-andstow and block stacking. A video showing the results can be found at https://lmb.informatik.uni-freiburg.de/projects/curriculum/
Lukas Hermann
M.Sc. Computer Science
My research interests include machine learning, LLMs and drug discovery.